Abstract
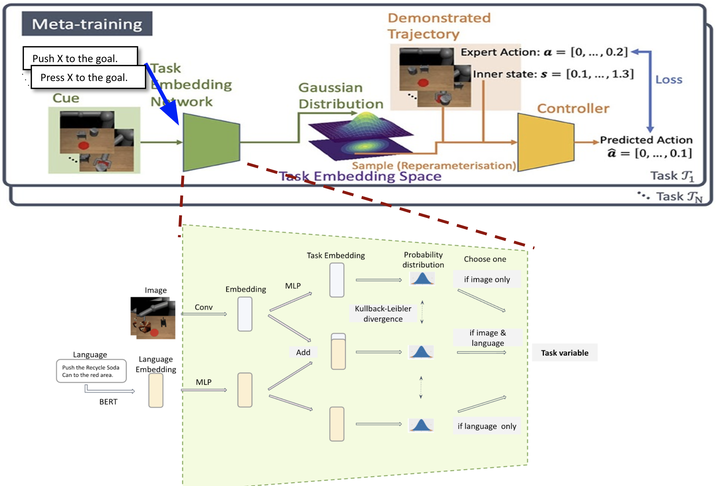
In order to solve the problem of sample efficiency in robot learning, an approach using meta-mimetic learning has been attracting attention recently. However, since demostration and experts are used as teacher data, the cost of creating teacher data is high. Therefore, we thought that we could reduce the cost of creating the teacher data for demostration by using natural language instructions. Based on the previous study of PETNet, we investigated the effect of language instructions on the task identification process in meta-imitation learning, and proposed MIL (Meta-Imitation Learning with Language). In the MIL Dataset, our experiments showed that the proposed method had a higher success rate and faster learning speed than previous studies. We hope that this research will contribute to the development of meta-imitation learning with language information, because it can handle language information that meta-imitation learning cannot handle.
Xin Zhang
Ph.D. student
Tatsuya Matsushima
Project Assistant Professor
My research interests include robot learning, robot system, and XR.