World robot challenge 2020 – partner robot: a data-driven approach for room tidying with mobile manipulator
Abstract
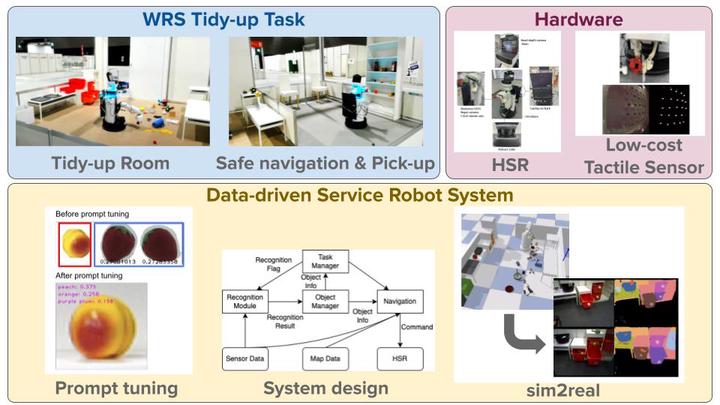
Tidying up a household environment using a mobile manipulator poses various challenges in robotics, such as adaptation to large real-world environmental variations, and safe and robust deployment in the presence of humans. The Partner Robot Challenge in World Robot Challenge (WRC) 2020, a global competition held in September 2021, benchmarked tidying tasks in real home environments, and, importantly, tested for full system performances. For this challenge, we developed an entire household service robot system, which leverages a data-driven approach to adapt to numerous edge cases that occur during the execution, instead of classical manual pre-programmed solutions. In this paper, we describe the core ingredients of the proposed robot system, including visual recognition, object manipulation, and motion planning. Our robot system won the second prize, verifying the effectiveness and potential of data-driven robot systems for mobile manipulation in home environments.
Tatsuya Matsushima
Project Assistant Professor
My research interests include robot learning, robot system, and XR.
Jumpei Arima
I am an engineer working for a motor company in Japan.
Toshiki Aoki
My research interests include distributed robotics, mobile computing and programmable matter.
Yuki Okita
I’m interested in mathematical optimization and machine learning. Especially I’m researching on theoretical aspects of them, but I’m also studying about its application such as ones on robots.
Yuya Ikeda
Master’s Student
Shohei Taniguchi
Project Researcher
Shoichi Seto
My research interests include utilization of Artificial Intteligence in the aerospace field
Shixiang Shane Gu
Visiting Associate Professor
Shixiang Shane Gu is a Senior Research Scientist at Google Brain, and a Visiting Associate Professor at the University of Tokyo, with research interests around (1) algorithmic problems in deep learning, reinforcement learning, robotics, and probabilistic machine learning, and (2) mastering a universal physics prior for continuous control. website