概要
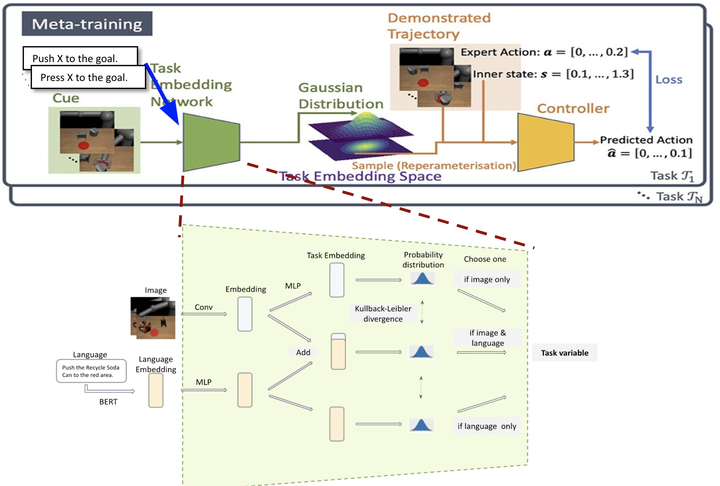
ロボット学習の課題であるサンプル効率を解決するために,近年メタ模倣学習を用いたアプローチが注目されている.しかしデモストレーションやエキスパートが教師データとなる手法である上,教師データの作成にコストはかかる.そこで我々は自然言語指示を用いることでデモストレーションにおける教師データの作成コストを抑えるれると考えた.我々は先行研究PETNetをベースにして,言語指示文がメタ模倣学習におけるタスクの特定プロセスに与える影響について調べた上,MILL(Meta-Imitation Learning with Language)を提案した.MIL Datasetにおいて提案手法が先行研究より成功率が高く学習速度が早いことが実験で示した.本研究によってメタ模倣学習が扱えなかった言語情報を扱えるようになり,言語情報を取り入れたメタ模倣学習の発展に貢献することを期待している