Self-Recovery Prompting: Promptable General Purpose Service Robot System with Foundation Models and Self-Recovery
概要
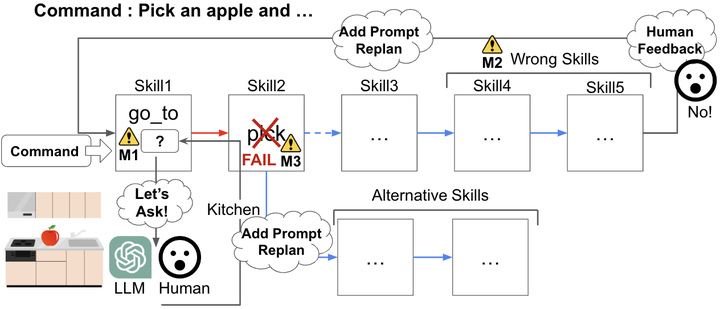
A general-purpose service robot (GPSR), which can execute diverse tasks in various environments, requires a system with high generalizability and adaptability to tasks and environments. In this paper, we first developed a top-level GPSR system for worldwide competition (RoboCup@Home 2023) based on multiple foundation models. This system is both generalizable to variations and adaptive by prompting each model. Then, by analyzing the performance of the developed system, we found three types of failure in more realistic GPSR application settings: insufficient information, incorrect plan generation, and plan execution failure. We then propose the self-recovery prompting pipeline, which explores the necessary information and modifies its prompts to recover from failure. We experimentally confirm that the system with the self-recovery mechanism can accomplish tasks by resolving various failure cases. Supplementary videos are available at https://sites.google.com/view/srgpsr .