World robot challenge 2020 – partner robot: a data-driven approach for room tidying with mobile manipulator
概要
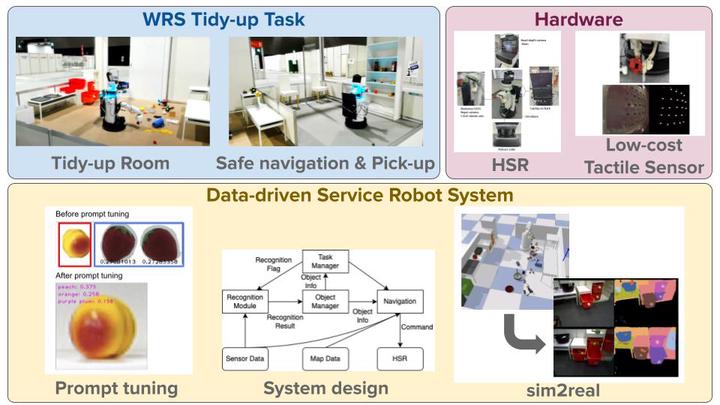
Tidying up a household environment using a mobile manipulator poses various challenges in robotics, such as adaptation to large real-world environmental variations, and safe and robust deployment in the presence of humans. The Partner Robot Challenge in World Robot Challenge (WRC) 2020, a global competition held in September 2021, benchmarked tidying tasks in real home environments, and, importantly, tested for full system performances. For this challenge, we developed an entire household service robot system, which leverages a data-driven approach to adapt to numerous edge cases that occur during the execution, instead of classical manual pre-programmed solutions. In this paper, we describe the core ingredients of the proposed robot system, including visual recognition, object manipulation, and motion planning. Our robot system won the second prize, verifying the effectiveness and potential of data-driven robot systems for mobile manipulation in home environments.
有馬 純平
I am an engineer working for a motor company in Japan.
青木 俊樹
My research interests include distributed robotics, mobile computing and programmable matter.
沖田 祐樹
数理最適化及び機械学習に興味があります。理論を主に研究していますが、ロボットとの融合等の社会応用についても勉強しています。
石本 幸暉
My research interests include robotics and rotot intelligence.
谷口 尚平
特任研究員
瀬戸 翔一
My research interests include utilization of Artificial Intteligence in the aerospace field